
 产品:17
产品:17
 联系我们
联系我们

整套 API 采用 TCP request/response 问答的方式, 机器人作为服务器接受客户端的请求并向客户端作出响应。API 请求由头部和数据区组成,头部为普通定长的字节, 用于标识数据包基本信息以及数据区的长度及类型等,数据区为序列化后的 JSON 数据,根据头部中的类型信息进行反序列化可以得到相应的 JSON 对象。API 的响应也由头部和数据区组成,头部为根据请求得到的定长字节, 数据区也为序列化后的 JSON 数据。

如何查询顶升机构状态
查询顶升机构状态(仅对选配顶升机构的机器人有意义)
请求
编号: 1027 (0x0403)
名称: robot_status_jack_req
描述: 查询顶升机构状态
JSON 数据区: 无
请求示例
略
响应
编号: 11027 (0x2B13)
名称: robot_status_jack_res
描述: 查询顶升机构状态的响应
JSON 数据区: 见下表
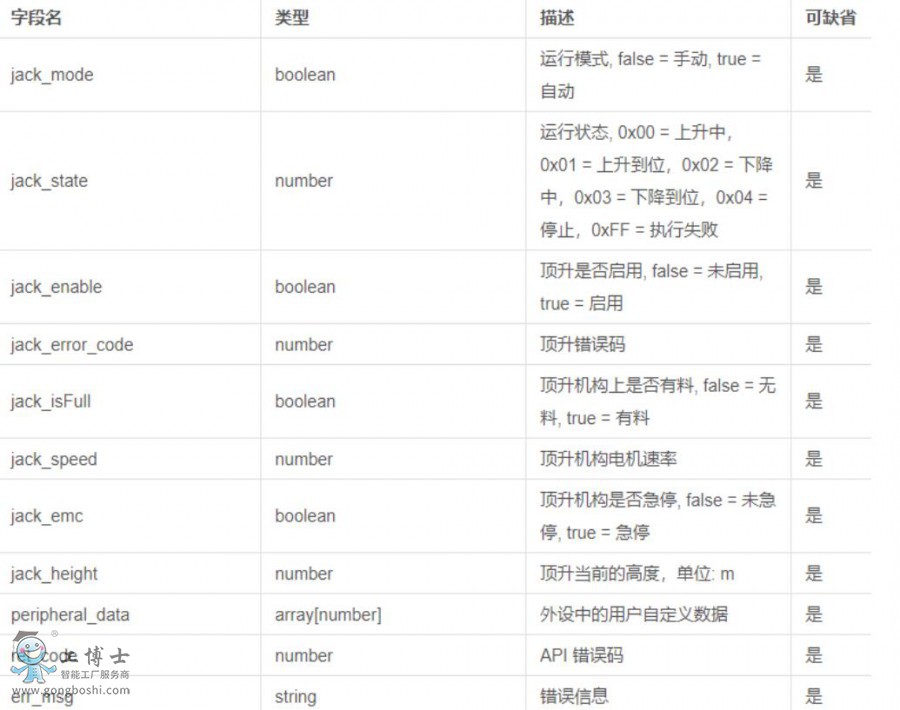
响应示例
略
如何查询货叉(叉车)状态
查询货叉(叉车)状态(仅对有货叉的机器人有意义, 如叉车等)
请求
编号: 1028 (0x0404)
名称: robot_status_fork_req
描述: 查询货叉(叉车)状态
JSON 数据区: 无
请求示例
略
响应
编号: 11028 (0x2B14)
名称: robot_status_fork_res
描述: 查询货叉(叉车)状态的响应
JSON 数据区: 见下表

响应示例
略
如何查询辊筒(皮带)状态
查询辊筒(皮带)状态(仅对选配有辊筒或皮带的机器人有意义)
请求
编号: 1029 (0x0405)
名称: robot_status_roller_req
描述: 查询辊筒(皮带)状态
JSON 数据区: 无
请求示例
略
响应
编号: 11029 (0x2B15)
名称: robot_status_roller_res
描述: 查询辊筒(皮带)状态的响应
JSON 数据区: 见下表

roller_error_code 定义:
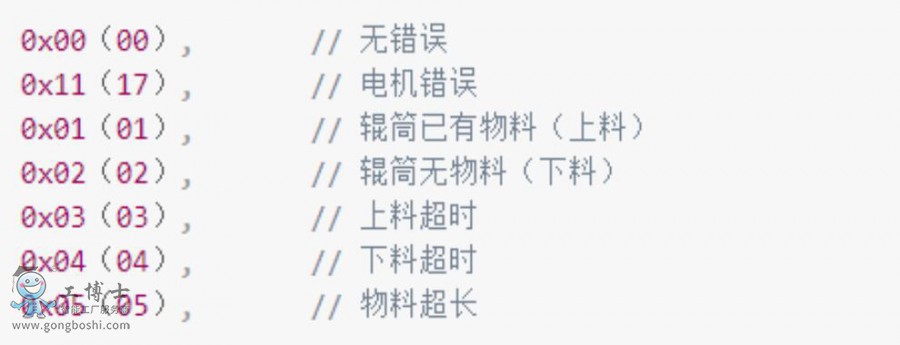
响应示例
略
- 下一篇:仙知AGV网络协议API使用教程(二)
- 上一篇:复合机器人的应用优势——仙知机器人