
 产品:17
产品:17
 联系我们
联系我们


如何查询机器人载入的地图以及储存的地图
查询机器人载入的地图以及储存的地图
请求
编号: 1300 (0x0514)
名称: robot_status_map_req
描述: 查询机器人载入的地图以及储存的地图
JSON 数据区: 无
请求示例
略
响应
编号: 11300 (0x2C24)
名称: robot_status_map_res
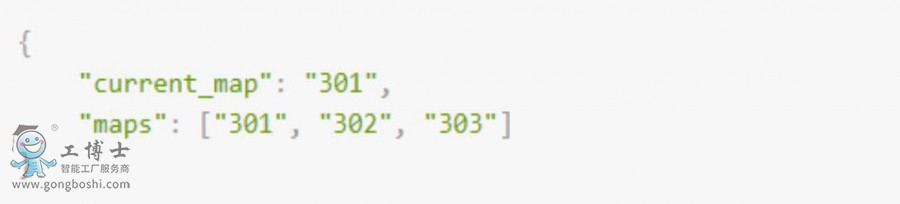
描述: 查询机器人载入的地图以及储存的地图的响应
JSON 数据区: 见下表

数据示例
响应示例
略
如何查询机器人当前载入地图中的站点信息
查询机器人当前载入地图中的站点信息
(该 API 用于获得地图中所有站点的坐标、角度以及类型信息)
请求
编号: 1301 (0x0515)
名称: robot_status_station_req
描述: 查询机器人当前载入地图中的站点信息
JSON 数据区: 无
请求示例
略
响应
编号: 11301 (0x2C25)
名称: robot_status_station_res
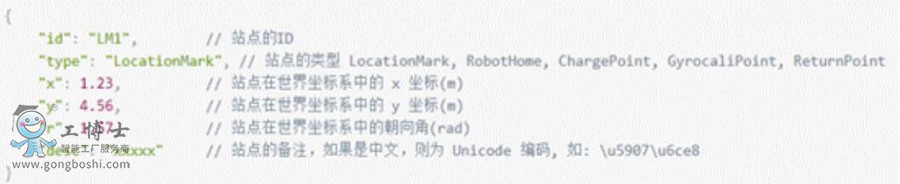
描述: 查询机器人当前载入地图中的站点信息的响应
JSON 数据区: 见下表

object 形式如下:
数据示例
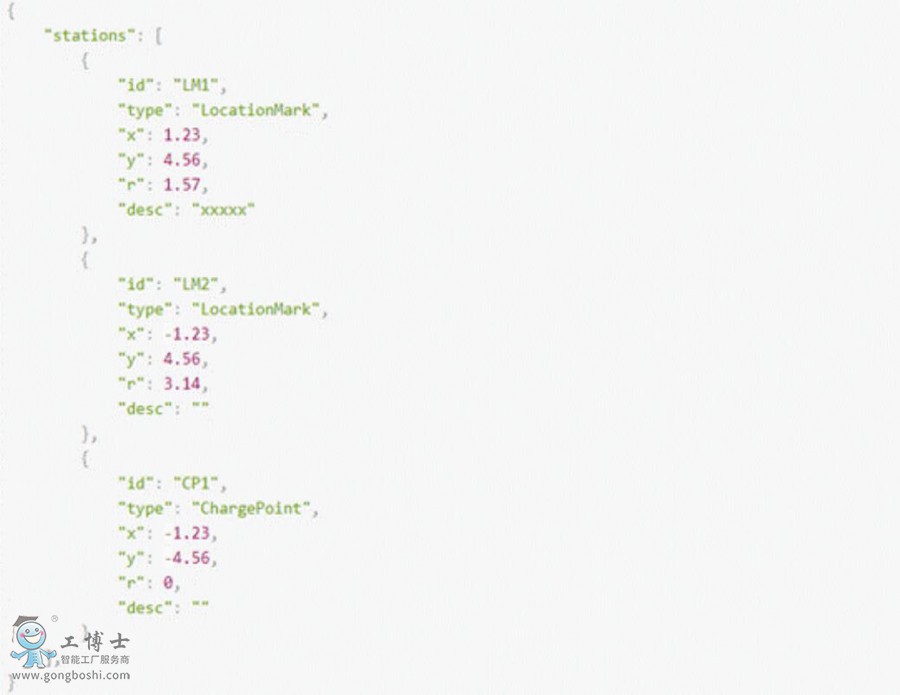
响应示例
略
如何查询机器人参数
查询机器人参数
请求
编号: 1400 (0x0578)
名称: robot_status_params_req
描述: 查询机器人参数信息
JSON 数据区: 见下表

数据示例
如下表示查询 MoveFactory 插件的 MaxAcc 参数

请求示例
略
响应
编号: 11400 (0x2C88)
名称: robot_status_params_res
描述: 查询机器人参数信息的响应
JSON 数据区: 见下
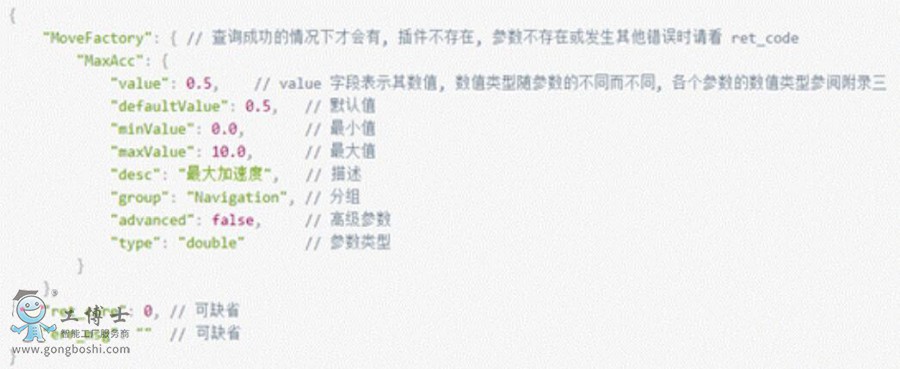
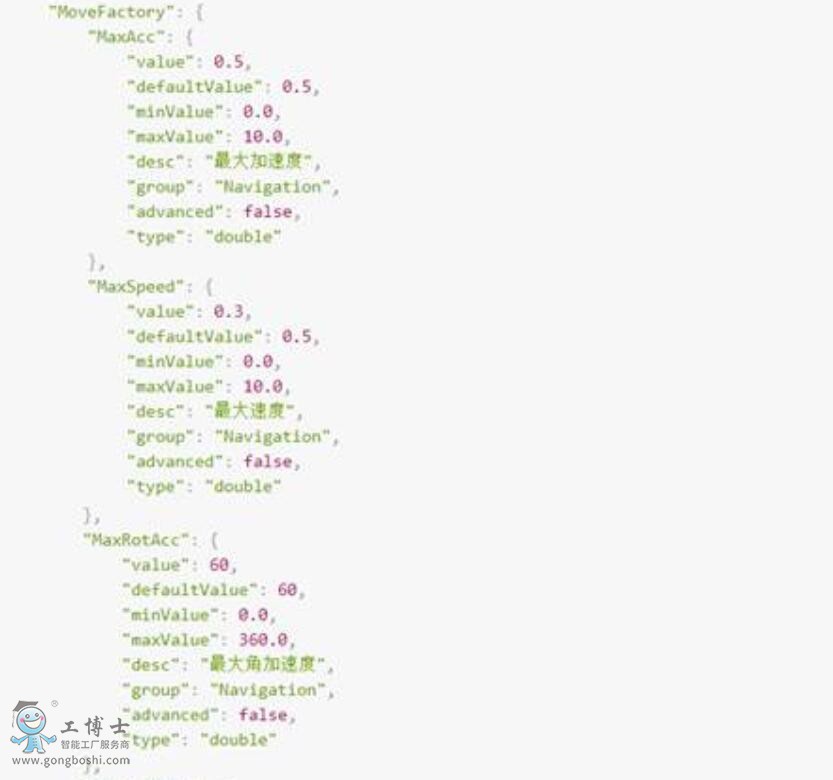
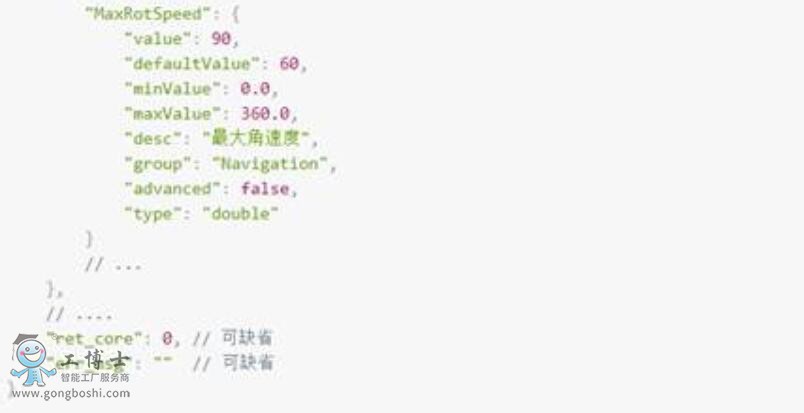
A: 如果请求中 plugin 与 param 均不缺省, 表示查询特定插件的某个参数, 下面以 MoveFactory 插件为例说明数据区的格式
plugin = "MoveFactory", param = "MaxAcc", 查询 MoveFactory 插件的 MaxAcc 参数, 响应数据区如下:
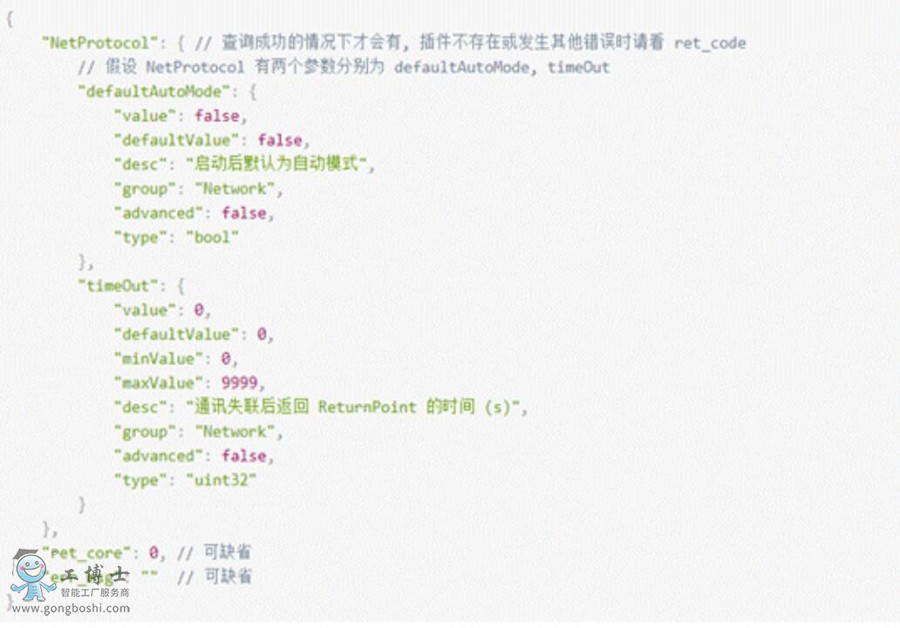
B: 如果请求中 plugin 不缺省而 param 缺省, 表示查询特定插件的所有参数, 下面以 NetProtocol 插件为例说明数据区的格式
plugin = "NetProtocol", param 缺省或 param="", 查询 NetProtocol 插件的所有参数:
C: 如果请求中 plugin 缺省, 表示查询所有参数
plugin 缺省或 plugin="", 查询所有参数:


响应示例
略
更多请点击咨询:仙知机器人